在这里介绍一下用51单片机驱动步进电机的方法。 这款步进电机的驱动电压12V,步进角为 7.5度 . 一圈 360 度 , 需要 48 个脉冲完成!!! 该步进电机有6根引线,排列次序如下:1:红色、2:红色、3:橙色、4:棕色、5:黄色、6:黑色。 采用51驱动ULN2003的方法进行驱动。 ULN2003的驱动直接用单片机系统的5V电压,可能力矩不是很大,大家可自行加大驱动电压到12V。 ;******************************************************************************;************************* 步进电机的驱动*************************************** ; DESIGN BY BENLADN911 FOSC = 12MHz 2005.05.19 ;--------------------------------------------------------------------------------- ; 步进电机的驱动信号必须为 脉冲信号!!! 转动的速度和脉冲的频率成正比!!! ; 本步进电机步进角为 7.5度 . 一圈 360 度 , 需要 48 个脉冲完成!!! ;--------------------------------------------------------------------------------- ; A组线圈对应 P2.4 ; B组线圈对应 P2.5 ; C组线圈对应 P2.6 ; D组线圈对应 P2.7; 正转次序: AB组--BC组--CD组--DA组 (即一个脉冲,正转 7.5 度) ;---------------------------------------------------------------------------------- ;----------------------------正转-------------------------- ORG 0000H LJMP MAIN ORG 0100HMAIN:MOV R3,#144 正转 3 圈共 144 脉冲 START: MOV R0,#00H START1: MOV P2,#00H MOV A,R0MOV DPTR,#TABLE MOVC A,@A+DPTRJZ START 对 A 的判断,当 A = 0 时则转到 START MOV P2,ALCALL DELAY INC R0DJNZ R3,START1MOV P2,#00H LCALL DELAY1;-----------------------------反转------------------------MOV R3,#144 反转一圈共 144 个脉冲 START2:MOV P2,#00H MOV R0,#05 START3: MOV A,R0MOV DPTR,#TABLE MOVC A,@A+DPTR JZ START2 MOV P2,A CALL DELAY INC R0DJNZ R3,START3 MOV P2,#00HLCALL DELAY1 LJMP MAINDELAY: MOV R7,#40步进电机的转速M3: MOV R6,#248 DJNZ R6,$ DJNZ R7,M3RETDELAY1: MOV R4,#20 2S 延时子程序 DEL2: MOV R3,#200 DEL3: MOV R2,#250 DJNZ R2,$ DJNZ R3,DEL3 DJNZ R4,DEL2 RET TABLE:DB 30H,60H,0C0H,90H 正转表 DB 00 正转结束DB 30H,90H,0C0H,60H 反转表 DB 00 反转结束 END 51单片机控制四相步进电机拿 到步进电机,根据以前看书对四相步进电机的了解,我对它进行了初步的测试,就是将5伏电源的正端接上最边上两根褐色的线,然后用5伏电源的地线分别和另外 四根线(红、兰、白、橙)依次接触,发现每接触一下,步进电机便转动一个角度,来回五次,电机刚好转一圈,说明此步进电机的步进角度为 360/(4×5)=18度。地线与四线接触的顺序相反,电机的转向也相反。此步进电机,则只需分别依次给四线一定时间的脉冲电流,电机便可连续转动起来。通过改变脉冲电流的时间间隔,就可以实现对转速的控制;通过改变给四线脉冲电流的顺序,则可实现对转向的控制。所以,设计了如下电路图:C51程序代码为: 代码一#include static unsigned int count; static unsigned int endcount; void delay(); void main(void) { count = 0; P1_0 = 0; P1_1 = 0; P1_2 = 0; P1_3 = 0; EA = 1; //允许CPU中断 TMOD = 0x11; //设定时器0和1为16位模式1 ET0 = 1; //定时器0中断允许 TH0 = 0xFC; TL0 = 0x18; //设定时每隔1ms中断一次 TR0 = 1; //开始计数 startrun: P1_3 = 0; P1_0 = 1; delay(); P1_0 = 0; P1_1 = 1; delay(); P1_1 = 0; P1_2 = 1; delay(); P1_2 = 0; P1_3 = 1; delay(); goto startrun; } //定时器0中断处理 void timeint(void) interrupt 1 { TH0=0xFC; TL0=0x18; //设定时每隔1ms中断一次 count++; }void delay(){ endcount=2; count=0; do{}while(count
推荐内容
-
![51单片机驱动步进电机__终极(完整版)]()
51单片机驱动步进电机__终极(完整版)
-
![联想U310完全拆解]()
联想U310完全拆解
-
![漏电断路器原理]()
漏电断路器原理
-
![风力发电机原理]()
风力发电机原理
-
![变频器的结构原理图解]()
变频器的结构原理图解
-

四年创下中国新锐SUV品牌捷途速度 Ta的秘密是什么?
-

2021年盈利再创新高,看加多宝的经营之道
-
![营收超77亿 龙湖智创生活凭什么?]()
营收超77亿 龙湖智创生活凭什么?
-
![因虚列费用套取资金等,富德生命人寿大连分公司被罚25万]()
因虚列费用套取资金等,富德生命人寿大连分公司被罚25万
-
![钟南山:生命可以被摧毁,但不能够被打败]()
钟南山:生命可以被摧毁,但不能够被打败
-

INTO YOU心慕与你引爆Z时代“玩色”美妆赛道
-
![走进位于喧嚣都市的舒适隐匿私享空间——上海吴中路928号会馆]()
走进位于喧嚣都市的舒适隐匿私享空间——上海吴中路928号会馆
-
![持续布局全产业链募投项目提升竞争力 金时科技成功登陆中小板]()
持续布局全产业链募投项目提升竞争力 金时科技成功登陆中小板
-

95后青年创业者马瑞龙的传奇经历,带领更多人能通过跨境电商盈利
-

广州医药呈“供销两旺”态势 医药制造业投资持续扩大
-

感冒很难受没必要“硬扛” 使用感冒药建议遵循“三要三不要”
-

燃放烟花爆竹须提高安全防范意识 一旦误伤眼睛要及时到医院就诊
-

信用卡呆账有哪些后果?信用卡呆账银行会如何处理?
-
中老年人冬季洗热水澡要避免“热刺激” 易使血管堵塞
-

猫毛比狗毛更容易致敏,无毛猫是过敏患者的完美宠物吗?
-

患上“年末综合征”?专家提醒:可用健康的方式积极应对
-

艾德证券期货助力创新奇智成功登陆港交所
-

2022年,开启“谊瑞易睡战略”元年
-

多家基金公司自购旗下基金,究竟意味着什么?
-
![连续3个交易日下跌30% 华宝股份:实控人朱林瑶被监察委员会立案]()
连续3个交易日下跌30% 华宝股份:实控人朱林瑶被监察委员会立案
-
![收评:沪指失守3400点 北向资金全天净卖出约150亿]()
收评:沪指失守3400点 北向资金全天净卖出约150亿
-
![深陷华夏幸福投资漩涡以来平安不动产再次更换董事长等要职]()
深陷华夏幸福投资漩涡以来平安不动产再次更换董事长等要职
-
![一大波头部公募同出手护盘:千万自购起步 最高2亿元]()
一大波头部公募同出手护盘:千万自购起步 最高2亿元
-
![渝开发预计2021年归母净利润同比至少增长9%]()
渝开发预计2021年归母净利润同比至少增长9%
-

畅享其乘,大有可为——一汽解放J6V上市发布
-
![谨防:“薅羊毛”反被“割韭菜” 兴业银行信用卡友情提醒:春节用卡安全第一]()
谨防:“薅羊毛”反被“割韭菜” 兴业银行信用卡友情提醒:春节用卡安全第一
-

沈阳和平区召开楼宇经济工作推进会 推进产业生态圈建设
-

去年辽宁省GDP同比增长5.8% 粮食产量再创新高
-

本溪与本钢签订融合框架协议 “双本”融合发展进入新阶段
-

食用速冻肉丸种类多 科学选购有三招
-

无鱼不成宴,过年吃鱼时需要注意些什么?
-

春节家政服务调查报告发布 深度保洁成为春节工作首选
-

各地发布春节消费提示:网络交易看细则,避免冲动消费
-
![东方日升签约波兰300MW项目,逐步挺进欧洲市场]()
东方日升签约波兰300MW项目,逐步挺进欧洲市场
-

可生食鸡蛋受消费者欢迎 与普通鸡蛋单价最高相差5倍
-
![现货黄金跌破1810美元/盎司]()
现货黄金跌破1810美元/盎司
-
![桥水:美联储或能容忍股市最多再跌20%]()
桥水:美联储或能容忍股市最多再跌20%
-

大力发展绿色消费 推进消费结构绿色转型升级
-
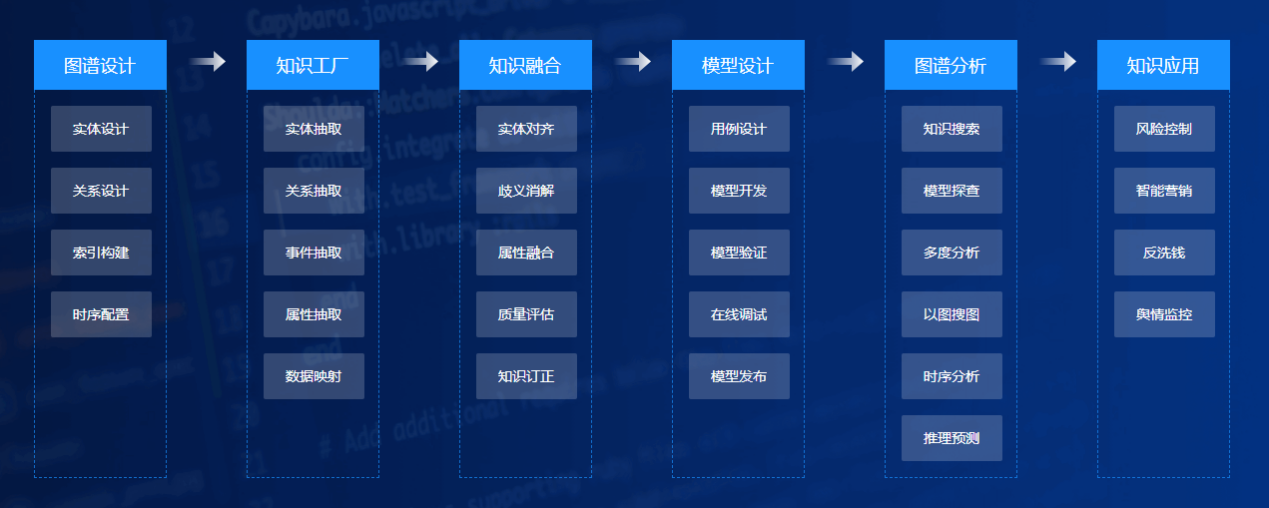
某大型股份制银行的知识图谱应用实践
-

广东推动医疗器械产业发展 到2023年营收年均复合增长率达20%
-
![中信证券逆市上涨!券商史上最大规模配股落地,还有3家坐等]()
中信证券逆市上涨!券商史上最大规模配股落地,还有3家坐等
-
![公募基金大幅减持被打脸!银行股逆势抬升,93亿元北向资金涌入]()
公募基金大幅减持被打脸!银行股逆势抬升,93亿元北向资金涌入
-
![网传职校将去资本化,职教板块一天大跌百亿元!券商:假消息]()
网传职校将去资本化,职教板块一天大跌百亿元!券商:假消息
-
![牛奶价格飞涨 美国人的早餐越来越贵]()
牛奶价格飞涨 美国人的早餐越来越贵
-
![国家药监局:做好疫苗药物审评审批和保质量、保供应工作]()
国家药监局:做好疫苗药物审评审批和保质量、保供应工作
-
![北京“健康宝”收到这类弹窗怎么办?权威回应来了]()
北京“健康宝”收到这类弹窗怎么办?权威回应来了
-

保险业去年原保费收入微降0.79% 健康险业务增长3.36%
-

欧恩贝跨界携手《小虎墩大英雄》,强强联合持续增强品牌影响力
-
2022冰雪上的巅峰对决,舒达床垫为运动与梦想助力!
-

迈威生物去年预亏超6亿元,重资投向研发能带来多大的盈利空间?
-

万事利预计去年净利润下降29.02%-10.1% 四季度销售收入大幅萎缩
-

慢性粒细胞白血病患者报告白皮书发布 20.2%的受调研患者耐药不耐受
-

49家公司IPO项目处于中止状态 不少公司已提交注册申请
-
![腾讯微保“我家保单”科技创新获认可,荣膺“全球保险科技案例奖”]()
腾讯微保“我家保单”科技创新获认可,荣膺“全球保险科技案例奖”
-

销售收入减少 皇台酒业预计去年净利润下降129.87%-144.80%
-
![正弦波发生器电路图]()
正弦波发生器电路图
-
![你所不知的滤波器的作用]()
你所不知的滤波器的作用
-
![ARM之协处理器CP15]()
ARM之协处理器CP15
-
![SPICE 仿真和模型简介]()
SPICE 仿真和模型简介
-
![喷油泵工作原理]()
喷油泵工作原理
-

水井坊预计去年销售量增长约40% 全部来自中高档酒
-

居然之家预计去年净利润23亿元-25.8亿元 行业景气度持续回升
-

中国奥园出售位于加拿大的多处资产 将获得7673万元收益
-
广州经传多赢投资咨询有限公司入选“卓信大数据计划”第五批百家成员单位
-

宝妈为新生儿取名字陈卓林,获全家人点赞!
-

今年A股两市跌多涨少 超4000只个股下跌
-

重磅车型新一代蒙迪欧亮相,能让长安福特重返巅峰吗?
-
全新高光赋能“高定美学” 柏荟成立艾维岚临床培训中心
-
![洞见数字化转型新机遇 榕树贷款科技引领驱动服务升级]()
洞见数字化转型新机遇 榕树贷款科技引领驱动服务升级
-
![违约!中泛控股未能支付2023年到期票据应付利息1691.7万港元]()
违约!中泛控股未能支付2023年到期票据应付利息1691.7万港元
-
![阳光股份称投资性房地产公允价值下降预计2021年度归母净利同比至多降53%]()
阳光股份称投资性房地产公允价值下降预计2021年度归母净利同比至多降53%
-
![时代中国控股拟先旧后新折让17.07%配售1.177亿股筹集约4亿港元]()
时代中国控股拟先旧后新折让17.07%配售1.177亿股筹集约4亿港元
-
![中国泛海披露17.9亿融资违约进展称:相关武汉项目将依法拍卖]()
中国泛海披露17.9亿融资违约进展称:相关武汉项目将依法拍卖
-

年货节好物清单来袭!贺年不能没有TA
-

微信推出“拜年红包”功能 如何设置微信小老虎图标
-

粤海饲料的股票今日开启申购,公司老板是郑石轩吗?
-

开超市需要办理什么证件?办理超市证件有哪些流程?
-

新年伊始,谊瑞智能床撬动亿万智能家居市场
-
![个人养老金制度落地倒计时 各方加速布局]()
个人养老金制度落地倒计时 各方加速布局
-
![靠借款经营的科德教育打响职教“赤膊战”?]()
靠借款经营的科德教育打响职教“赤膊战”?
-
![据悉奥联物业及李三毛收购惠州金睿达物业92%股权]()
据悉奥联物业及李三毛收购惠州金睿达物业92%股权
-
![香江控股为子公司提供不超5000万贷款担保 累计担保余额27.87亿元]()
香江控股为子公司提供不超5000万贷款担保 累计担保余额27.87亿元
-
![四大券商整体降薪30%?内部人:没听说!金领内卷,竞争残酷]()
四大券商整体降薪30%?内部人:没听说!金领内卷,竞争残酷
-
![曲江文旅扭亏为盈:预计2021年度归母净利至多750万元]()
曲江文旅扭亏为盈:预计2021年度归母净利至多750万元
-

房子首付不够怎么办?房子首付能贷款吗?
-

宠物用品进货渠道有哪些?这个垂直采购平台你需要了解
-

交强险最多可以赔偿多少?交强险有哪些赔偿项目?
-

新生儿医保卡去哪里领取?领取新生儿医保卡时需携带什么资料?
-
![上海市人社局副局长叶霖霖一行领导莅临社宝科技调研交流]()
上海市人社局副局长叶霖霖一行领导莅临社宝科技调研交流
-

菠萝蜜没熟可以吃吗?菠萝蜜该如何催熟?
-

蹲马步一般要蹲多久?蹲马步锻炼有哪些注意事项?
-

哪些减肥操的效果比较好?减肥操一天可以做几次?
-
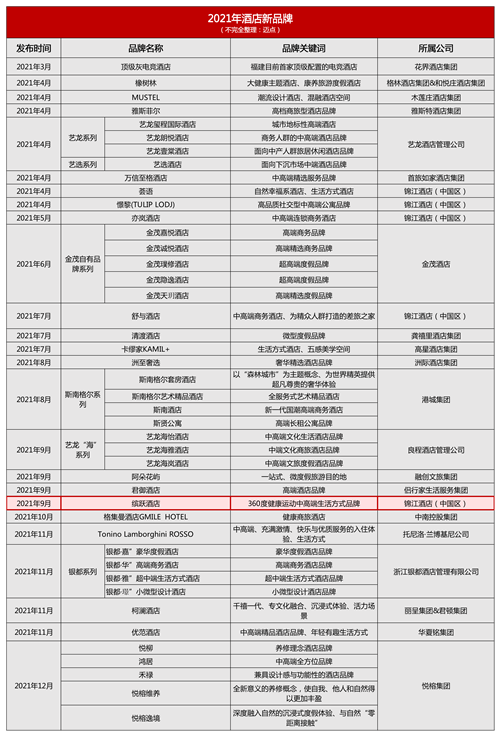
新旧交锋 2022年的酒店市场谁能胜?
-

车厘子价格普遍上涨,今年春节还能实现“车厘子自由”吗?
-
别忘了陪你吃康师傅的人
-

选车困难症?家用MPV王者传祺M6 PRO帮你治愈
-

二手高端消费品市场发展潜力巨大,信任危机何解?
-

黑龙江:激发科技创新潜能,甄选重大科技成果做好就地转化
-

山东将在中医药服务模式等方面开展先行先试 不断提升服务能力
-

精准对标SpaceX,瞄准“液体可回收复用火箭”,深蓝航天完成近2亿元A轮融资
-

山东将培育农业特色产业单项冠军,如何走好“夺冠之路”?
-
![混合云成为企业上云最优选择,未来发展挑战与机遇并存]()
混合云成为企业上云最优选择,未来发展挑战与机遇并存
-

金普新区五大主导产业增势强劲 持续推进智能化升级
-
自贡高新区推进营商专员进企业 着力打造“高兴办”营商品牌
-

山东省新生优势加速凝聚 发展动能实现新跨越
-
![秃如其来的生意!斗不过植发,“假发第一股”瑞贝卡被遗忘]()
秃如其来的生意!斗不过植发,“假发第一股”瑞贝卡被遗忘
-
![去年新增减税降费超万亿 涉税违法行为更将严查严办]()
去年新增减税降费超万亿 涉税违法行为更将严查严办
-
![奥园10.78亿元出售加拿大项目 助力境外债务重组]()
奥园10.78亿元出售加拿大项目 助力境外债务重组
-
![消息指蔚来正考虑在新加坡二次上市 公司回应:不予置评]()
消息指蔚来正考虑在新加坡二次上市 公司回应:不予置评
-
![绿地控股披露2022年上半年拟新增不超760亿元担保额度]()
绿地控股披露2022年上半年拟新增不超760亿元担保额度
-
![保障“舌尖上的安全”2021年我国主要农产品监测合格率97.6%]()
保障“舌尖上的安全”2021年我国主要农产品监测合格率97.6%
-
![特斯拉发布强劲财报 警告供应链问题将持续至2022年]()
特斯拉发布强劲财报 警告供应链问题将持续至2022年
-
![冠城大通拟计提存货跌价准备约6-7亿元等预计2021年净利润亏8-9亿元]()
冠城大通拟计提存货跌价准备约6-7亿元等预计2021年净利润亏8-9亿元
-
![平安幸福年 同心共守护]()
平安幸福年 同心共守护
-
![新能源车企频频切入保险赛道 意在扩大产业链条]()
新能源车企频频切入保险赛道 意在扩大产业链条
-
![张一鸣再退出多家字节关联公司职务 卸任字节跳动法定代表人]()
张一鸣再退出多家字节关联公司职务 卸任字节跳动法定代表人
-
![国家药监局:推进化妆品新法规平稳实施 严防严管严控化妆品安全风险]()
国家药监局:推进化妆品新法规平稳实施 严防严管严控化妆品安全风险
-
![三部门发文明确金融机构客户尽职调查具体要求3月1日起施行]()
三部门发文明确金融机构客户尽职调查具体要求3月1日起施行
-
![十部门:到2025年培育形成一批叫得响、质量优、特色显的农村电商产品品牌]()
十部门:到2025年培育形成一批叫得响、质量优、特色显的农村电商产品品牌
-
![异乡过年,温暖不减]()
异乡过年,温暖不减
-
![“就地”过春节,精彩不一样]()
“就地”过春节,精彩不一样
-
![“只卖9块9”的“隔离险”,葫芦里装着什么药?]()
“只卖9块9”的“隔离险”,葫芦里装着什么药?
-

紧跟“三农”方向,护好国人“油罐子”,健康保障践行长康
-

美素佳儿奶粉好吗?美素佳儿从这三点出发证实自身品质
-
![压力传感器工作原理]()
压力传感器工作原理
-
![电子血压计原理]()
电子血压计原理
-
![各类放大器电路设计]()
各类放大器电路设计
-
![电感线圈的常识普及]()
电感线圈的常识普及
-
![联想ThinkPad T410真机拆解]()
联想ThinkPad T410真机拆解
-
![无线通信原理]()
无线通信原理
-

格力电器公布未来三年股东回报规划 分红总额或不低于300亿元
-

去年我国R&D经费投入保持较快增长 基础研究经费占比提升
-
![Coinbase产品副总裁披露 NFT 平台界面和购买流程]()
Coinbase产品副总裁披露 NFT 平台界面和购买流程
-
![字节跳动将推出元宇宙社交App“派对岛”]()
字节跳动将推出元宇宙社交App“派对岛”
-

互联网平台上的“隔离险”热销,真像宣传的那么靠谱吗?
-

高端系列啤酒让不少消费者止步,是物有所值还是收“智商税”?
-
![警惕抢票软件背后的风险]()
警惕抢票软件背后的风险
-
![年货消费,今年更红火]()
年货消费,今年更红火
-
![满足超两千万辆电动车充电需求]()
满足超两千万辆电动车充电需求
-
![平台春节“发红包”如何实现双赢]()
平台春节“发红包”如何实现双赢
-
![直播带货亟须 走出“顶流迷信”]()
直播带货亟须 走出“顶流迷信”
-
![北京:新增感染者均来自管控人员]()
北京:新增感染者均来自管控人员
-
![北京:多次违规停放用户将被限制使用]()
北京:多次违规停放用户将被限制使用
-
![房贷利率下调 年轻人要珍惜“首贷”]()
房贷利率下调 年轻人要珍惜“首贷”
-
![负压救护车筑牢冬奥会疫情防控屏障]()
负压救护车筑牢冬奥会疫情防控屏障
-
![害怕过年的人,到底在怕什么]()
害怕过年的人,到底在怕什么
-
![虽说虎年将至,但别被这些谣言给唬了]()
虽说虎年将至,但别被这些谣言给唬了
-
![理性看待走红的乡村生活短视频]()
理性看待走红的乡村生活短视频
-

银保监会:坚持不懈防范化解金融风险,防止资本在金融领域无序扩张
-

强化农业农村人才队伍建设 实施乡村产业振兴带头人培育“头雁”项目
-

我国进一步缩短负面清单 为外商投资提供更广阔的空间
-

科技赋能冰雪运动打破时空界限 冰雪旅游发展呈火热趋势
-

数字人民币的应用场景不断丰富 已涵盖200多个线下消费场景
-

年报业绩预告火热披露中 投资者要警惕高股价的财务大洗澡行为
-

强化常态化打击,高效打击“假企业”“假申报”等严重涉税违法行为
-

清朗·2022年春节网络环境整治行动将启 严防“饭圈”乱象反弹反复
-

持续深化减费让利工作 将政策红利转化为惠及企业的发展动力
-

深圳:试点开展互联网处方药销售,实现相关事项“一网通办”
-
![特斯拉报告显示第四季度其比特币持有量没有变化]()
特斯拉报告显示第四季度其比特币持有量没有变化
-
![波音Q4财报:787客机造成45亿美元损失 三年来首次实现正现金流]()
波音Q4财报:787客机造成45亿美元损失 三年来首次实现正现金流
-
![受电视面板价格下跌影响 LG Display第四季度利润同比下降30%]()
受电视面板价格下跌影响 LG Display第四季度利润同比下降30%
-
![美联储3月份维持利率在0%-0.25%区间的概率为5%]()
美联储3月份维持利率在0%-0.25%区间的概率为5%
-
![美股快速下挫 现货黄金回落至1820美元/盎司下方]()
美股快速下挫 现货黄金回落至1820美元/盎司下方
-
![无线电报的发展史]()
无线电报的发展史
-
![任意波形发生器简介]()
任意波形发生器简介
-
![传感器工作原理]()
传感器工作原理
-
![连续3个交易日下跌30% 华宝股份:实控人朱林瑶被监察委员会立案]()
连续3个交易日下跌30% 华宝股份:实控人朱林瑶被监察委员会立案
-
![华润啤酒预计2021年实现净利润同比增长110%-124%]()
华润啤酒预计2021年实现净利润同比增长110%-124%
-
![数字电路基础]()
数字电路基础
-
![对比FirstSolar:不看好汉能是因为我们不瞎]()
对比FirstSolar:不看好汉能是因为我们不瞎
-
![氢氧燃料电池原理]()
氢氧燃料电池原理
-
![最便宜USB延长线自己制作的做法(图解)]()
最便宜USB延长线自己制作的做法(图解)
-
![完美微分电路之我见]()
完美微分电路之我见
-
![详解ROHS标准]()
详解ROHS标准
-
![电弧炉原理]()
电弧炉原理
-
![水井坊:2021年净利预增约64%,销售量增长约四成全部来自中高档酒]()
水井坊:2021年净利预增约64%,销售量增长约四成全部来自中高档酒
-
![因净利润为负且营收低于 1 亿,皇台酒业或被实施退市风险警示]()
因净利润为负且营收低于 1 亿,皇台酒业或被实施退市风险警示
-

安勇旭:绽放人生,让爱远行
-

一文读懂FTX最新IEO项目「PsyOptions」
-

践行绿色办奥理念,远东电缆液冷大功率充电电缆亮相北京冬奥会
-

新增80项升级技术!深度解析解放J6V的升级之路
-
![31省份2021年经济成绩单揭晓:17省人均GDP超1万美元]()
31省份2021年经济成绩单揭晓:17省人均GDP超1万美元
-
![茅台拟41.1亿投向酱香酒习水新项目,新增系列酒产能1.2万吨]()
茅台拟41.1亿投向酱香酒习水新项目,新增系列酒产能1.2万吨
-

引领婴幼儿奶粉高端品质 雅士利率先获得欧盟产品认证
-

安徽电缆用“硬核”实力铸就高端核级电缆“护城河”
-
![DeBank推出Web3社交平台]()
DeBank推出Web3社交平台
-
![基尔霍夫电流定律学习宝典]()
基尔霍夫电流定律学习宝典
-
![Webmin 简介]()
Webmin 简介
-
![合成孔径雷达原理]()
合成孔径雷达原理
-
![什么是TDR?TDR原理介绍]()
什么是TDR?TDR原理介绍
-
![功率放大器的分类及其参数]()
功率放大器的分类及其参数
-
![起火引燃特斯拉?比亚迪再回应:已申请立案,向造谣者索赔100万]()
起火引燃特斯拉?比亚迪再回应:已申请立案,向造谣者索赔100万
-
![空欢喜!中远海控日赚2.45亿元,否认给员工发30个月年终奖]()
空欢喜!中远海控日赚2.45亿元,否认给员工发30个月年终奖
-

跨境创业总部基地:聚焦海南时代新征程
-

顾家床垫首批深睡卷装床垫交付“亚运会主会场”,为亚运护航提供专业深睡保障